Embodied perspective-taking behaviors for clearer robot communication in collaborative tasks.
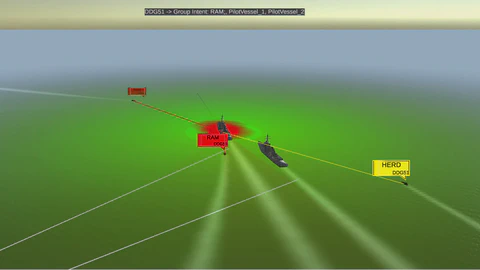
Multi-task generative models (CVAE, TimeGAN, ACGAN, LSTM-GAN) for forecasting vessel motion and reconstructing sparse maritime sensor data.
Deep and probabilistic intent classifiers (HMMs, LSTMs, Transformers) for early vessel behavior prediction in adversarial maritime scenarios.
Unity-based naval simulator with physics-consistent multi-agent scenarios, real-time threat heatmaps, and ML-driven intent recognition for maritime research.
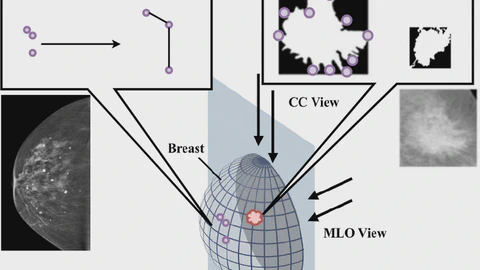
Graph Convolutional Neural Networks with Mask-RCNN backend for bilateral and ipsilateral mammogram fusion, malignancy detection, and semantic segmentation.