NavySim 2.0 accepted for IEEE Transactions on Games
Our enhanced multi-vessel simulation engine has been accepted for publication in IEEE ToG.
Welcome to the personal website of Md Abu Sayed, a Postdoctoral Research Scholar at the Center for Digital Cardiovascular Innovations, University of Miami Miller School of Medicine / UHealth System. Working under Dr. Yiannis S. Chatzizisis, he applies artificial intelligence and computational modeling to advance cardiovascular care. One thread runs through all of his research: temporal, generative, and explainable deep learning that learns from complex real-world signals and supports decisions where reliability and trust matter.
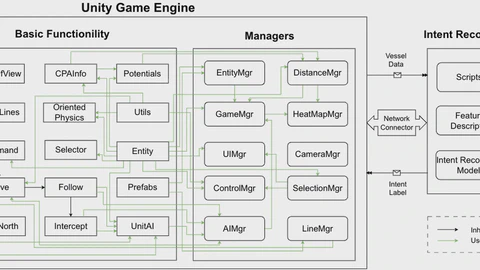
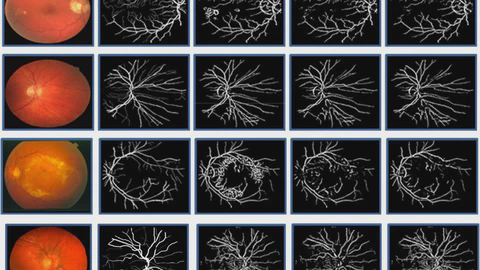
That thread connects two worlds he loves: medicine and autonomous systems. Sayed began in medical image analysis, developing semi-supervised retinal vessel segmentation and multi-view Graph Convolutional Networks for mammography, learning to model fine structure under data scarcity. He then earned his Ph.D. in Computer Science and Engineering from the University of Nevada, Reno (May 2026), where his ONR-funded dissertation, Deep Generative and Explainable Learning Frameworks for Intent Recognition in Naval Domain, produced the NavySim maritime simulator, explainable feature attribution (CPFI/TFIS), and MTITP—a multi-task GAN that jointly recognizes vessel intent, forecasts future intent, and generates intent-conditioned trajectories. His cardiovascular research now brings these temporal and generative methods back to medicine, reuniting his clinical-imaging roots with the AI he advanced in autonomy.
Before his Ph.D., Sayed was a Lecturer at The Millennium University, Bangladesh, and he earned his B.S. from Khulna University (thesis on retinal vessel segmentation) and M.S. from UNR (thesis on ThreatMap for naval security awareness). Beyond research, he has served as Council Member of the Graduate Student Association (Chair, Awards Committee), Vice President of the International Students Club (organizing Night of All Nations with 600 participants), and Co-Lead of Google Developer Group Campus (co-organizing DevFest Reno).
Ph.D. in Computer Science & Engineering
University of Nevada, Reno
M.Sc. in Computer Science & Engineering
University of Nevada, Reno
B.Sc. in Computer Science & Engineering
Khulna University, Bangladesh
My work lives where two passions meet—medicine and autonomous systems—joined by one toolkit: temporal, generative, and explainable deep learning. From retinal and mammography imaging, to naval intent recognition, to today’s cardiovascular AI, I build models that learn from complex real-world signals, anticipate what comes next, and explain why.
At the University of Miami's Center for Digital Cardiovascular Innovations, I apply AI and computational modeling—including generative and explainable deep learning—to cardiovascular imaging and clinical decision support.
My ONR-funded dissertation: the NavySim simulator, explainable feature attribution (CPFI/TFIS), and MTITP—a multi-task GAN that jointly classifies vessel intent, forecasts future intent, and generates intent-conditioned trajectories.
Semi-supervised retinal vessel segmentation and multi-view Graph Convolutional Networks for mammography—building expertise in multimodal fusion and modeling under data scarcity.
My goal is anticipatory AI that understands its environment and acts with reliability, transparency, and safety—now extending these methods into cardiovascular medicine and digital health. Download Research Statement (PDF) · Please reach out to collaborate 😃

Our enhanced multi-vessel simulation engine has been accepted for publication in IEEE ToG.
Starting a postdoc at the Center for Digital Cardiovascular Innovations, applying AI and computational modeling to cardiovascular care.
Presented work on early intent classification and proactive maritime threat prediction at the IEEE Conference on Automation Science and Engineering.
Paper on feature-aware maritime intent recognition accepted for the IEEE International Conference on Future Machine Learning and Data Science.
Presented our maritime situational awareness framework at the International Conference on Harbor, Maritime and Multimodal Logistic Modeling & Simulation.
Presented our multi-vessel naval simulator at IEEE CoG in Yokohama, Japan.